제품정보
- 종합 제품 카탈로그
- 종합 제품 카탈로그
- 산업별 제품분류
- 특장차량 · 중장비
- 토목 · 안전 · 유지관리계측
- 전자/유압 제어[EPEC] 컨트롤러
- 종류별 제품분류
- 각도 (기울기) 센서
- 가속도 센서
- 길이 측정 센서
- 자이로 센서
- 출력 변환 장치
- I/O 장치
- 무선 리모트 컨트롤러
- 통신 컨버터
- HMI·디스플레이
- 인디케이터
- 데이터로거·멀티플렉서
- 전원 장치
- 종합 제품 카탈로그
- 특장차량 · 중장비
- 토목 · 안전 · 유지관리계측
- 전자/유압 제어[EPEC] 컨트롤러
- HMI · 디스플레이 장치
- 각도 (기울기) 센서
- 가속도 센서
- 길이 측정 센서
- 자이로 센서
- 출력 변환 장치
- I/O 장치
- 무선 리모트 컨트롤러
- 통신 컨버터
- HMI·디스플레이
- 인디케이터
- 데이터로거·멀티플렉서
- 전원 장치

 |

제품 사양
출력 데이터 해석


주문 코드
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
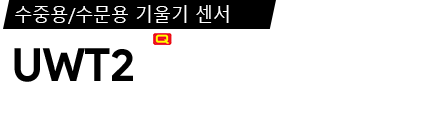
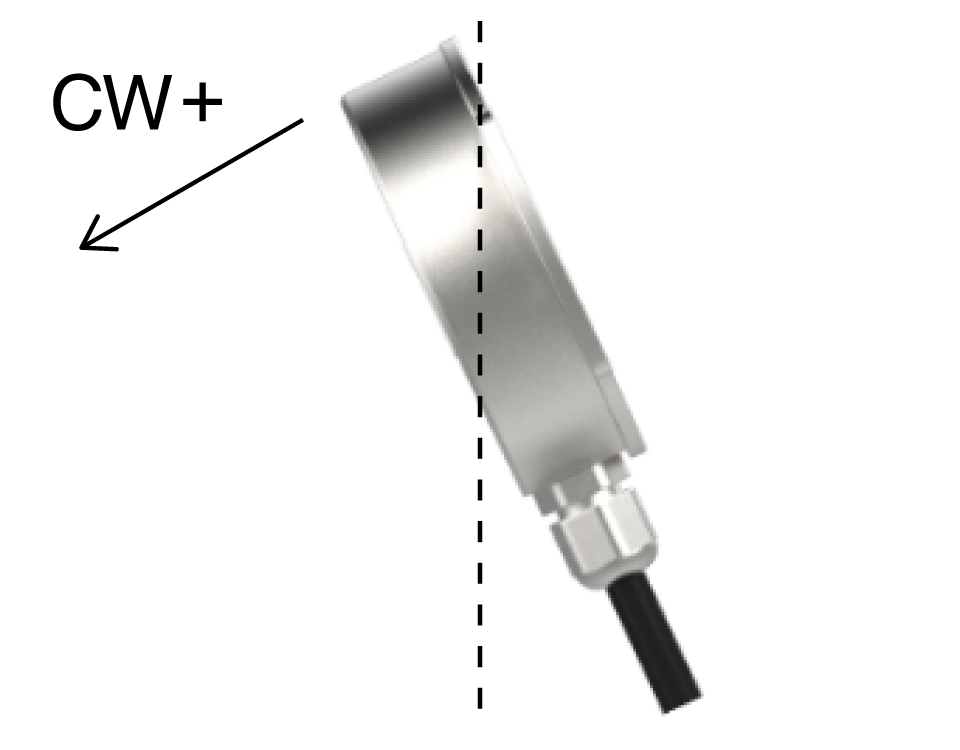
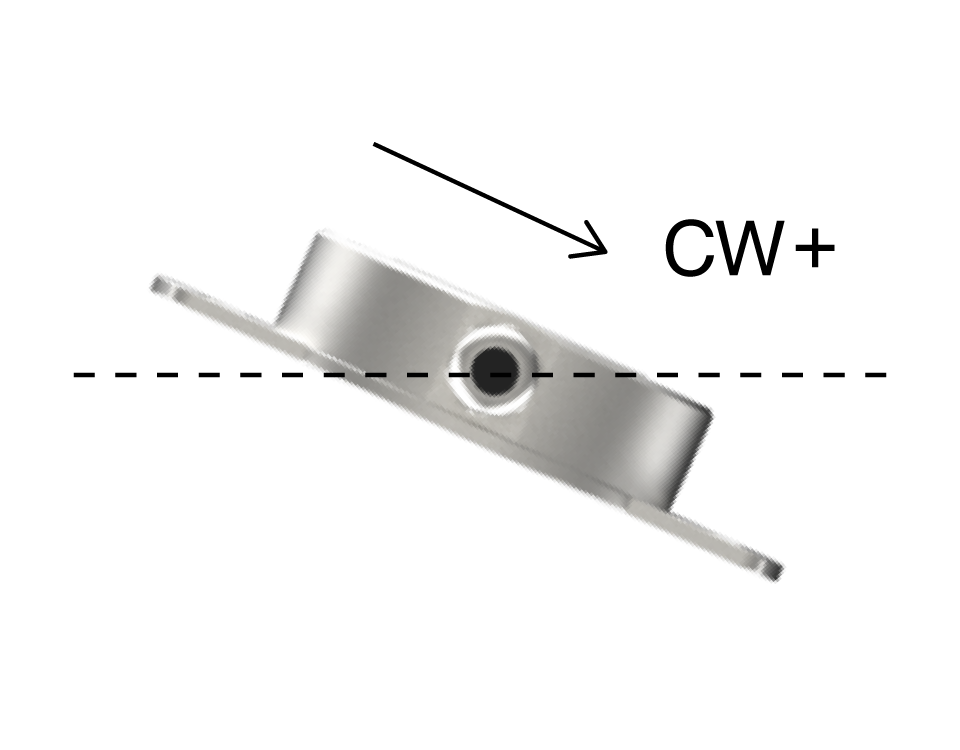
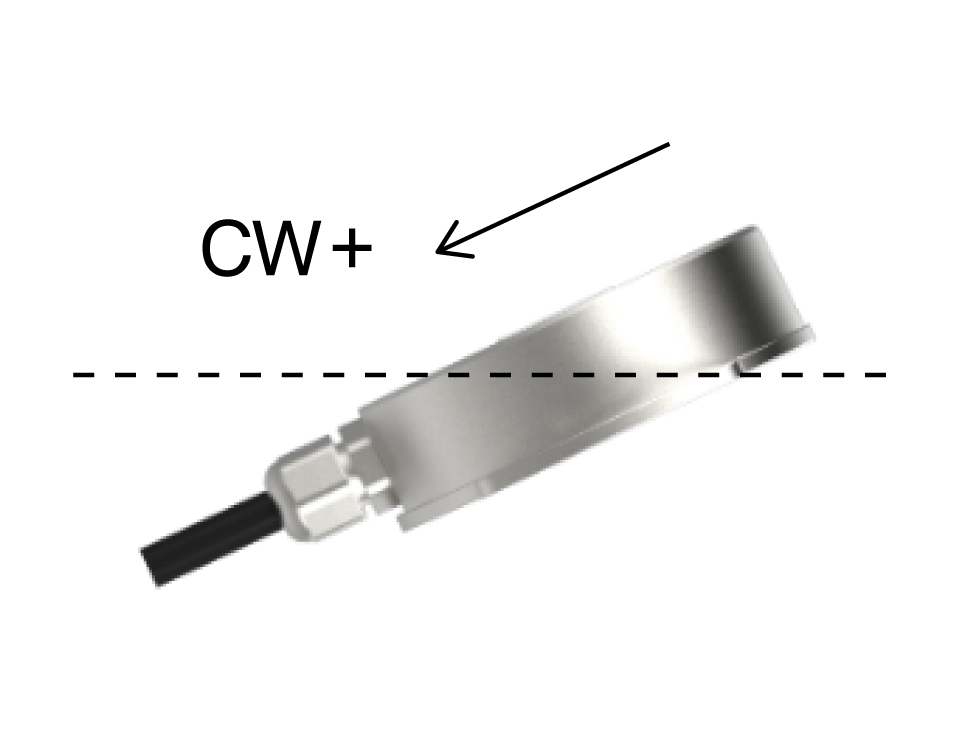
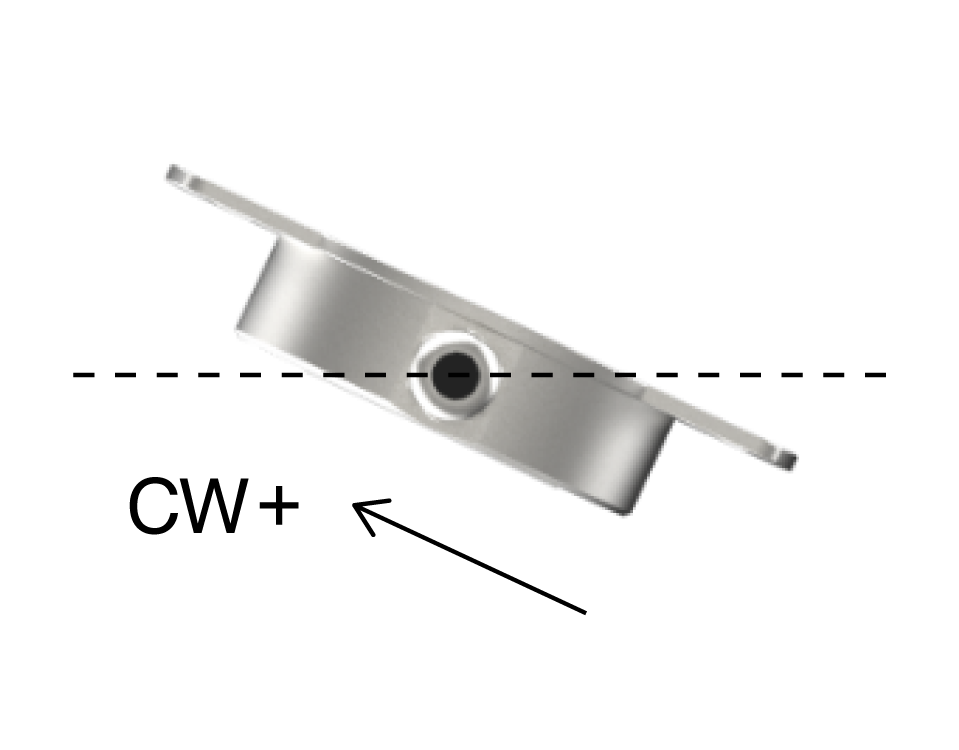
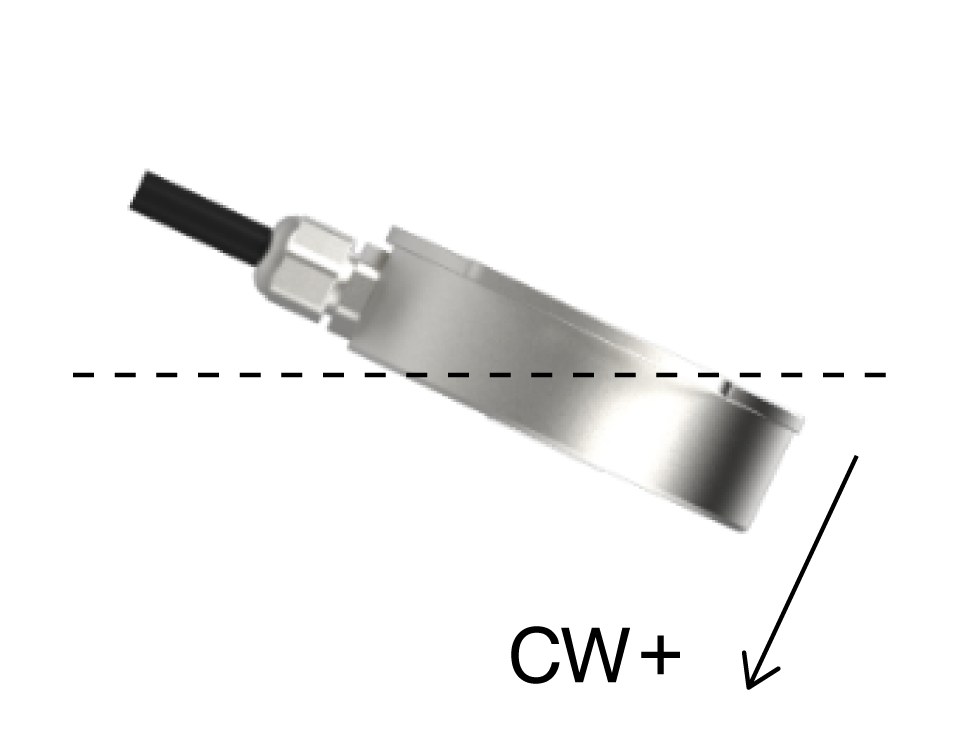
축 감지 방향
결선 방법
RS485 통신 규격
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||

|

주의 사항
|
|
-
(주)다스
본사 : 전라북도 김제시 백산면 지평선산단3길 61
지사 : 경기도 화성시 비봉면 비봉로 128 (양노리)
전화 031) 356-3541 | 팩스 031) 356-3572
이메일 sales@das-co.com | 사업자등록번호 124-86-67387




Copyright ⓒ 2018 (주)다스. All rights Reserved